

9.3.2015
11. Manévre a rovnovážne režimy, princípy porovnania a rozpoznania podobnosti
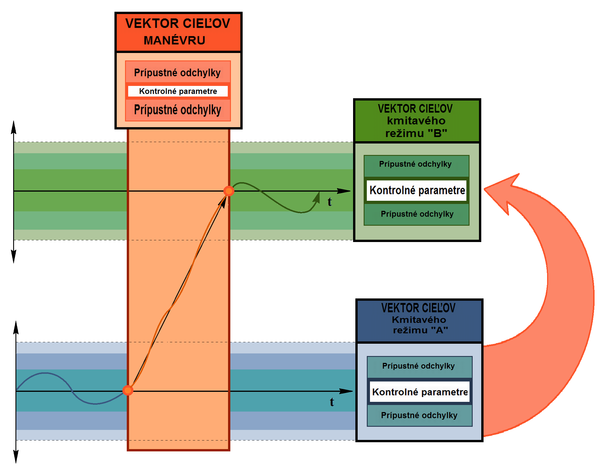
Teraz sa vrátime k uzavretým systémom. Udržateľne riadený systém sa môže nachádzať buď v rovnovážnom režime, alebo v režime manévra. Jeden a ten istý, reálne prebiehajúci režim môže byť interpretovaný aj ako rovnovážny, ak súvisí s jednym vektorom cieľov, aj ako režim manévra, ak súvisí s druhým vektorom cieľov.
Vo vektore cieľov rovnovážneho režimu sú kontrolné parametre v čase nemenné - konštantné. V reálnom stabilnom rovnovážnom režime vektor stavu kolíše v relatívne nemennom postavení v podpriestore kontrolných parametrov, a voľné parametre sa pri tom môžu hociako meniť.
Pojem „rovnovážny režim“ je trochu podobný pojmu „rovnováha“, no je širší, pretože všedné vedomie zvyčajne vníma „rovnováhu“ staticky, ako nepohyblivú nemennosť v čase. V rovnovážnom režime je proces kmitania systému v čase nemenný vzhľadom na bod „rovnováhy“, súradnice ktorého sú nemenné v čase. Systém cezeň prechádza, no nemôže v ňom zotrvávať, hoci len preto, že odchýlky od neho sú nižšie ako prah citlivosti meracích prístrojov, alebo riadenie je ťažkopádne, má limitovanú operačnú rýchlosť a nemôže sa včas zastaviť. To posledné objasníme.

Pojem o záporných spätných väzbách odráža fakt zostrojenia systému riadenia objektu takým spôsobom, že detekcia systémom riadenia odchýlok objektu od ideálneho režimu, ktorý je predpísaný vektorom cieľov, vyvoláva riadiace pôsobenie, nasmerované na návrat objektu do ideálneho režimu. Pri kladných spätných väzbách pomáha riadenie pri rušení (od momentu jeho vzniku) odvádzania objektu od ideálneho režimu v smere pôsobenia na objekt rušenia.
Keďže rušenie môže byť riadeným pôsobením zo strany nejakého procesu riadenia zvonku (jeho riadiace pôsobenie sú jeho priame väzby), tak pri skúmaní súhrnu vzájomne vložených procesov riadenia vo vzťahu ľubovoľného z do neho vložených procesov samoriadenia ich kladné spätné väzby môžu byť nazvané ako „podporujúce“ a ich záporné spätné väzby – ako „hasiace“, „potlačujúce“, „zdržiavace“, „brzdiace“.
Hoci sa doteraz (rok 2004) tieto termíny v teórii riadenia nepoužívajú, tak viac zodpovedajú charakteru spätných väzieb v procese riadenia, ako všeobecne prijaté - konvenčné rozdelenie spätných väzieb na „kladné“ a „záporné“, ktoré sa intuitívne chápu nejednoznačne a vyžadujú doplňujúce vysvetlenie. Ak ideálny režim je nemennosť vektora cieľov v čase, do ktorého sú zahrnuté kontrolné parametre, tak z dôvodu limitovanej operačnej rýchlosti systému riadenia jeho pôsobenie, kompenzujúce odklon od ideálneho režimu (pri záporných spätných väzbách), sa od nejakého okamihu samo stane rušivým a objekt míňa ideálny bod.1 Takto systém riadenia sám rozkmitáva objekt vzhľadom na ideálny režim vektora cieľov (otázka je iba o tom, či amplitúdy kmitov ležia v prípustných hraniciach alebo nie). Najlepšie je to vidieť v stabilných vyvážených režimoch. V nestabilných vyvážených režimoch je amplitúda kmitov alebo vyššia ako prípustná, alebo narastá od kmitu ku kmitu, a to aj pri záporných spätných väzbách.
T.j., sám princíp záporných spätných väzieb podľa kontrolných parametrov je v teórii a praxi riadenia nevyhnutný, avšak je to len jeden z údajov v teórii a praxi riadenia ako celku.
Vo vektore cieľov v režime manévru sa mení hoci len jeden z kotrolných parametrov. Pri analýze reálneho procesu stabilného manévru v podpriestore kontrolných parametrov vektor stavu sleduje s nejakou chybou riadenia zmenu vektora cieľov (obsahujúceho len kontrolné parametre). Na voľné parametre, ako aj v prípade rovnovážneho režimu, sa žiadne obmedzenia nekladú.
Režim manévrovania, v ktorom sú derivácie2 kontrolných meniacich sa parametrov podľa času konštantné (v medziach prípustnej chyby riadenia), sa nazýva ustáleným (stabilným) manévrom. Ustálený manéver je sám o sebe rovnovážnym režimom, z ktorého vektora cieľov sú vylúčené kontrolné parametre, meniace sa v procese manévra.
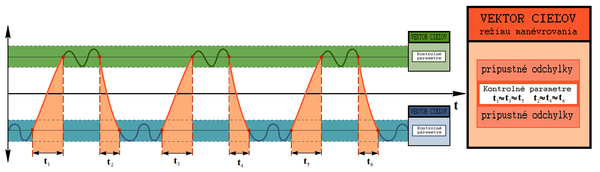
Ak vychádzame z reálne prebiehajúceho procesu riadenia a tvoríme na základe predpokladov (t.j. hypoteticky) vektor cieľov subjektu, ktorý reálne proces riadi (to sa nazýva „identifikácia“ vektora cieľov), tak jeden a ten istý režim možno interpretovať ako vyvážený režim, alebo ako stabilný kmitavý (oscilačný) manéver. Takto sa režim, pri priradení k vektoru cieľov iba tých parametrov, ktoré kmitajú okolo stredných hodnôt (v závislosti od hraníc na chyby riadenia), interpretuje ako vyvážený režim. Ak priradíme k vektoru cieľov hoci len jeden z náhodne sa meniacich parametrov, tak sa režim interpretuje ako manéver.
Presne takto možno jeden a ten istý režim vnímať ako stabilný, vychádzajúc z jedných ohraničení vektora chyby; a ako nestabilný, vychádzajúc z oveľa prísnejších ohraničení vektora chýb. Na tomto predpoklade je dobre vidieť objavenie sa možnosti dvojakého chápania stability: podľa ohraničení a znižovania odchýlok a podľa predvídateľnosti.
Jednoduchší príklad rovnovážneho režimu – jazda automobilom po rovnej ceste pri konštantnej rýchlosti. Všetky ukazovatele na prístrojovom paneli, okrem spotreby benzínu, sa držia v ustálených polohách; no volantom treba občas „pohýbať“, pretože nerovnosti cesty, bočný vietor, rôzny tlak v pneumatikách, vôľa podvozku a volantu sa snažia automobil vybočiť.
Manévre sa delia na slabé a silné. Toto rozdelenie neodráža efektívnosť manévru. Pojem slabý manéver je spojený s vyváženými režimami. Prevedenie systému z jedného vyváženého režimu do druhého vyváženého režimu – to je jeden z druhov manévru. Niektoré uzavreté systémy majú takú vlastnosť, že ak sa tento prevod realizuje dostatočne pomaly, tak vektor stavu systému v procese manévru sa nebude veľmi líšiť od vektora stavu vo východzom a (alebo) konečnom vyváženom režime, pri vylúčení počas manévru sa meniacich kontrolných parametrov a niektorých voľných parametrov, ktoré sú in-formačne späté s kontrolnými.
Ak na lodi pootočíme kormidlom palubu o 3 - 4 stupne, tak loď začne opisovať kruh s veľmi veľkým priemerom a dôjde k zmene uhla kurzu. Ak sa to deje mimo dohľadu na pobrežie a pri zamračenom počasí, tak väčšina pasažierov nepostrehne manéver zmeny kurzu. Ale ak v plnej rýchlosti rýchleho plavidla (25 - 30 uzlov) náhle otočí kormidlo palubou o 20 - 30 stupňov, tak paluba počas pohybu kormidla šklbne pod nohami na opačnú stranu ako kormidlo, a potom začne ľudským vestibulárnym aparátom plne citeľná zmena kurzu, sprevádzaná plne viditeľným náklonom plavidla o 10 i viac stupňov.

Hoci v oboch prípadoch zmena kurzu môže byť rovnaká, hydrodynamické charakteristiky lode sa v prvom prípade slabého manévru nebudú silno odlišovať od režimu priamočiareho pohybu. V druhom prípade, keď loď začne vstupovať do cirkulácie s priemerom nie viac ako 4 - 5 dĺžok trupu lode, klesne rýchlosť, prejaví sa hodnotovo významná priečna zložka rýchlosti obtekania trupu a náklon a celkový obraz obtekania trupu a hydrodynamické charakteristiky sa budú kvalitatívne odlišovať od bývalých charakteristík pri priamočiarom pohybe alebo slabých manévroch.
Rozdelenie manévrov na silné a slabé umožňuje v rade prípadov výrazne zjednodušiť modelovanie správania sa uzavretého systému v procese slabého manévrovania bez straty kvality výsledkov modelovania. Pretože výber miery kvality je vždy subjektívny, tak aj rozdelenie manévrov na silné a slabé sa určuje subjektivizmom pri hodnotení kvality modelovania a riadenia. Ale, ak je takéto rozdelenie možné, tak k slabému manévru možno nájsť jemu analogický rovnovážny režim (vo vyššie uvedenom zmysle).
Pre fyzicky kvalitatívne rovnaké procesy je rozdelenie manévrov na silné a slabé založené na modelovaní v nekonečnom čase. Nakoľko poňatie času a jeho meranie je spojené s výberom etalónovej frekvencie, tak za etalónovú frekvenciu môžu byť prijaté aj vlastné frekvencie kmitania objektov riadenia, uzavretých systémov, procesov interakcie uzavretých systémov s okolitým prostredím. To vedie k poňatiu dynamicky podobných (čiastočne alebo úplne) objektov, systémov a procesov, pre ktoré sú procesy (rovnovážne režimy a manévre), vztiahnuté k času, založenom na zhodných vlastných kmitaniach, v nejakom zmysle identické. Podrobne to skúma teória podobnosti, ktorá je súčasťou mnohých čiastkových odvetví vedy. Doprevádzanie slova „identickosť“ prívlastkom „nejaká“ je podmienené tým, že podobnosť sa môže realizovať na rôznych fyzických nosičoch in-formačných procesov riadenia, rôznymi vzájomnými spodobeniami parametrov podobných systémov.
Spodobenie – znerozmerenie, t.j. zbavenie reálnych fyzikálnych a in-formačných parametrov ich rozmerov - mier (metrov, kilogramov, sekúnd a pod.) ich vztiahnutím k nejakým hodnotám charakteristík uzavretého sytému a prostredia, ktoré majú rovnaké rozmery – miery (metre, kilogramy, sekundy a pod.). Výsledkom je objavenie sa bezmerných jednotiek merania, v nejakom zmysle zhodných parametrov u porovnávaných objektov, rovnako charakteristikých pre každý z nich. Táto vlastnosť celovesmírnej miery je základom modelovania procesov na jednych fyzických nosičoch, pričom reálne prebiehajú na druhých fyzických nosičoch (analogové počítače); aj základom in-formačného (čisto teoretického) modelovania, pri ktorom je dôležitý in-formačný model, a jeho fyzický nosič je úplne nezaujímavý (ľubovoľný algoritmus, predpisujúci postupnosť akcií, v podstate nezávisí od jeho materialového nosiča: papiera, diskety, CD, počítača, človeka).
Analýza priebehu podobného modelujúceho procesu môže prebiehať v oveľa vyššom frekvenčnom pásme, ako priebeh reálneho podobného modelovaného procesu. To dáva možnosť nahliadnúť do budúcich variantov vývoja modelovaného procesu, čo je vlastne základom riešenia úloh riadenia vo všeobecnosti a najmä úlohy o predpovedateľnosti. Príklady tohto druhu modelovania – to sú všetky aerodynamické a pevnostné experimenty a výpočty v letectve, lodiarstve a kozmonautike. Modelovanie vysokofrekvenčného procesu v nízkofrekvenčnom pásme umožňuje odsledovať príčinno-následkové väzby, ktoré zvyčajne unikajú pozorovateľovi pri sledovaní rýchlo prebiehajúceho reálneho procesu. Takýmto príkladom je rýchlostné a vysokorýchlostné filmové snímkovanie (viac ako 105 snímok za sekundu) a spomalená (v porovnaní s realitou) projekcia záznamu, čo umožňuje riešiť mnohé technické a biologické (medicínske) problémy.
Pochopenie silných a slabých manévrov u podobných objektov a uzavretých systémoch je spojené s rozlíšením manévrov v bezrozmerných jednotkách času. Podobné môžu byť aj fyzické procesy s rôznou kvalitou, napríklad, opisované rovnakým matematickým modelom. No pre kvalitatívne rovnaké fyzické procesy, ktoré sa líšia rozmerovými charakteristikami, budú oblasti reálnych parametrov silných a slabých manévrov odlišné. Toto je vždy nutné mať na pamäti, ak sa jedná o reálne uzavreté systémy s rovnakou kvalitou, ktoré sa líšia svojimi rozmerovými charakteristikami.
1Tomuto odklonu od ideálnych hodnôt sa dá vyhnúť, ak zadáme takúto požiadavku pri tvorbe systému riadenia, no aj v tomto prípade bude oscilačný (kmitavý) charakter rovnovážneho režimu pokračovať. Avšak oscilácie budú prebiehať v nejakom pásme hodnôt na jednu stranu od predpísaných ideálnych hodnôt rovnovážneho režimu.
2Z lat. derivatio = odvodenie, odchýlenie; derivácia (druhotná, odvodená veličina) – jeden zo základných pojmov matematickej analýzy – pozn. prekl.